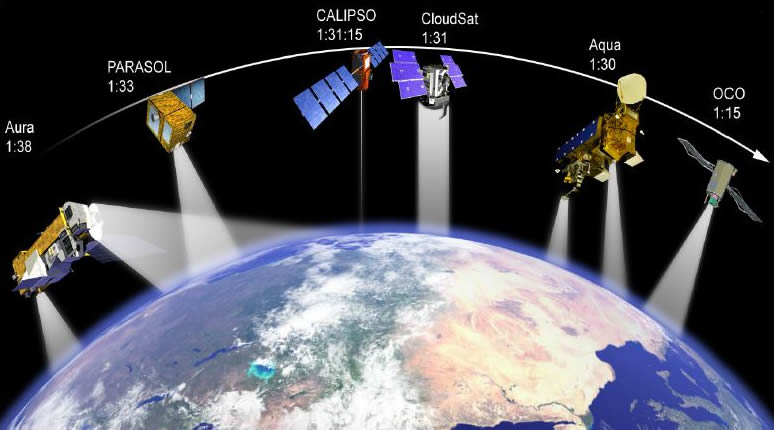
ماهواره های سنجش از دور (RS)
چکیده :
رادار یک سیستم الکترومغناطیسی است که برای تشخیص و تعیین موقعیت هدف بکار می رود . با رادار می توان درون محیطی را که برای چشم ،غیر قابل نفوذ است دید مانند تاریکی ،باران،مه.برف،غبار و غیره . اما مهمترین مزیت رادار توانایی آن درتعیین فاصله یا حدود هدف می باشد .کاربرد رادارها در اهداف زمینی ، هوایی،دریایی، فضایی و هواشناسی می باشد.
امواج رادار چیزی است که در تمام اطراف ما وجود دارد، اگر چه دیده نمیشود. اما مرکز کنترل ترافیک فرودگاهها برای ردیابی هواپیماها چه آنها که بر روی باند فرودگاه قرار دارند و چه آنها که در حال پرواز هستند، از رادار استفاده میکنند. در برخی از کشورها پلیس از رادار برای شناسایی خودروهای با سرعت غیر مجاز استفاده میکند. ناسا از رادار برای شناسایی موقعیت کرة زمین و دیگر سیارات استفاده میکند، همین طور برای دنبال کردن مسیر ماهواره ها و فضاپیماها و برای کمک به کشتیها در دریا و مانورهای رزمی از آن استفاده میشود. مراکز نظامی نیز برای شناسایی دشمن و یا هدایت جنگ افزارهایشان از آن استفاده میکنند.
هواشناسان برای شناسایی طوفانها، تندبادهای دریایی و گردبادها از آن استفاده میبرند. شما حتی نوعی خاص از رادار را در مدخل ورودی فروشگاهها میبینید که در هنگام قرار گرفتن اشخاص در مقابلشان، درب را باز میکنند. بطور واضح میبینید که رادار وسیله ای بسیار کاربردی میباشد.
استفاده از رادار عموماً در راستای سه هدف زیر میباشد:
· شناسایی حضور یا عدم حضور یک جسم در فاصله های مشخص – عمدتاً آنچه که شناسایی میشود متحرک است و مانند هواپیما، اما رادار قادر به شناسایی حضور اجسامی که مثلاً در زیرزمین نیز مدفون شده اند، نیز میباشد. در بعضی از موارد حتی رادار میتواند ماهیت آنچه را که مییابد مشخص کند، مثلاً نوع هواپیمایی که شناسایی میکند.
· شناسایی سرعت آن جسم- دقیقاً همان هدفی که پلیس در بزرگراهها برای کنترل سرعت خودروها از آن استفاده میکند.
· جابهجایی اجسام – شاتلهای فضایی و ماهواره های دوار بر دور کره زمین از چیزی به عنوان رادار برای شناسایی حفره های مجازی ، تهیه نقشه جزئیات زمین ، نقشه های عوارض جغرافیایی سطح ماه و دیگر سیارات استفاده میکنند.
مقدمه خیالپردازی در بسیاری از مواقع به حقیقت میپیوندد. جالب است بدانید که اختراع رادار هم در حقیقت همانند بسیاری از اختراعات دیگر ریشه در یک داستان علمی – تخیلی دارد. واژه رادار که امروزه در سرتاسر دنیا کاربرد دارد، همانند رادیو و تلویزیون یک اصطلاح بین المللی شده است. در واقع اختراع رادار از یک پدیده فیزیکی و بسیار طبیعی به نام انعکاس گرفته شده است. همه ما بارها و بارها بازگشت صدا را در مقابل صخرههای عظیم تجربه کرده ایم. نور خورشید هم با استفاده از همین پدیده است که از سوی ماه و در هنگام شب به ما میرسد.
امواج رادیویی و الکترومغناطیس نیز قابلیت انعکاس و بازتاب دارند و رادار بر اساس همین خاصیت ساده بوجود آمد. سادهترین رادارها در حقیقت از یک فرستنده و یک گیرنده رادیویی بوجود آمدند. در ابتدا این وسیله فقط قادر بود وجود شیء را اعلان کند و به هیچ وجه توانایی تشخیص اندازه و ویژه گی های دیگر آن را نداشت. بنابرین بشر در ساخت رادار نیز از طبیعت استفادههای فراوان و اساسی کرده و با تغییراتی جزئی برای خود وسیله ای سودمند ساخته است.
تاریخچه نخستین بار در سال 1901 « هوگو ژرنسبارک » که او را «ژول ورن» آمریکایی مینامند، در یک داستان علمی _ تخیلی ، آن را طرح ریزی کرد. در سال 1906 ، یک دانشجوی 23 ساله آلمانی ، به نام « هولفس یر » دستگاهی ساخت که با اصول رادارهای امروزی میتوانست امواجی را بسوی موانع بفرستد و بازتاب آنها را دریافت دارد. آزمایش اساسی ارسال امواج الکترومغناطیسی بسوی هواپیماهای در حال پرواز ، بوسیله یک دانشمند فرانسوی به نام « پیر داوید » انجام یافت. در آغاز جنگ دوم جهانی بود که تکنسینهای انگلیسی موفق شدند، نخستین مدلهای راداری امروزی را بسازند. اما کار آنها یک مشکل اساسی داشت. امواج تا نقطهای که میخواستند نمیرسید و تنها تا پنج هزار متر برد داشت.
به همین دلیل یک فرانسوی دیگر به نام "موریس پونت" در سال 1930 موفق به اختراع دستگاهی جالب به نام "مانیترون" شد که امواج بسیار کوتاه رادیویی را بوجود میآورد و به همین دلیل رادارهایی که به کمک این وسیله تکمیل شدند توانستند تا دهها کیلومتر بیش از رادار قبلی امواج را ارسال کنند. دستگاه اختراعی پونت در سال 1935 ابتدا در کشتی معروفی به نام نرماندی نصب شد و توانست آن را از خطر برخورد با کوههای عظیم یخی شناور در اقیانوس محافظت کند و بدین ترتیب رادار علاوه بر استفاده وسیع در هوا ، سطح دریاها را هم به تسخیر خود در آورد.
مکانیسم عمل همانطور که امواج دریا و امواج صوتی پس از رسیدن به مانعی منعکس میشوند، امواج الکترومغناطیسی هم وقتی به مانعی برخورد کردند، بر میگردند و ما را از وجود آن آگاه میسازند. به کمک امواج الکترومغناطیسی نه تنها از وجود اجسام در فاصله دور باخبر میشویم، بلکه بطور دقیق تعیین میکنیم که ایا ساکن هستند یا از ما دور و یا به ما نزدیک میشوند. حتی سرعت جسم نیز بخوبی قابل محاسبه است. وقتی امواج منتشر شده از رادار ، به یک جسم دور برخورد میکنند، به طرف نقطه حرکت بر میگردند. امواج برگشتی توسط دستگاههای خاص در مبدا تقویت میشوند و از روی مدت رفت و برگشت این امواج ، فاصله بین جسم و رادار اندازه گیری میشود.
کاربردها
· نظامیدرجنگ جهانی دوم زمانیکه رادار وارد صحنه نبرد شد، انگلستان پیگاههای وسیعی را با رادار مجهز کرد و به این ترتیب هواپیماهای آلمانی در کار خودشان دچار اختلال شدند. به عقیده بسیاری از کارشناسان همین رادار بود که آلمان را علی رغم حملههای گسترده هوایی بر روی شهرهایی نظیر لندن ، ناکام گذاشت. همچنین بسیاری از زیر دریایی هایی که تعداد زیادی از کشتیهای حمل و نقل و ناوهای جنگی متفقین را به قعر دریا میفرستادند، با کمک رادارها شناسایی شدند و در عملیات گوناگون خود دچار شکست گردیدند.
رادارها حتی در توپخانهها ، موشک اندازها و جنگ های زیر دریاییها نیز وارد عمل شدند و توجه قدرتهای بزرگ تسلیحاتی را ، حتی پس از شکست هیتلر و پایان جنگ جهانی به خودشان جلب کردند. اما صرف نظر از کاربردها نظامی، رادار خدمات صلح آمیز بسیاری را بری انسان امروزی در برداشته است. کاهش سوانح در مسافرت های دریایی و هوایی همگی مدیون رادار هستند.
· علمی
در حقیقت یکی از مهمترین کاربردهای علمی رادار با آغاز عصر فضا بوجود آمد و بشر توانست برای اولین بار با کمک رادار به فضا دسترسی پیدا کند و حتی سطح سیاره ها و اشکال گوناگون آنها را شناسایی کند. این موفقیت سالها قبل از آن بود که سفینه ها بتوانند از سطح سیارات عکسبرداری کنند. بنابرین رادار علی رغم خرابی هاییکه با گسترده تر کردن جنگ ها به وجود آورد، توانست خدمات بسیار ارزنده ای را برای جامعه بشری به ارمغان آورد و انسان این همه را مدیون طبیعت بی ادعاست!
· صنعتی وبازرگانی
شناسایی حضور یا عدم حضور یک جسم در فاصله های مشخص – عمدتاً آنچه را که توسط رادار شناسایی میشود متحرک می باشد ( مانند هواپیما ) اما رادار قادر به شناسایی حضور اجسام که مثلاً در زیر زمین نیز مدفون شده اند، میباشد. در بعضی از موارد حتی رادار میتواند ماهیت آنچه را که مییابد مشخص کند، مثلاً نوع هواپیمیی که شناسایی میکند. شناسایی سرعت آن جسم- دقیقاً همان هدفی که پلیس از آن در بزرگراهها برای کنترل سرعت خودروها از آن استفاده میکند.
· مثالی از کاربرد رادار
حال بیایید در مورد نمونه ای واقعی از راداری که برای شناسایی هواپیماهای در حال پرواز بکار میرود صحبت کنیم. سیستم رادار در ابتدا با روشن کردن فرستنده ، یک دسته موج رادیویی متراکم در آسمان و در جهات مختلف پخش میکند. این ارسال برای چند میکروثانیه صورت میپذیرد، حال فرستنده خاموش شده و گیرنده سیستم رادار مترصد دریافت پژواک امواج که به همراه اطلاعات حاصل از پدیده داپلر نیز هستند میماند.
امواج رادیویی با سرعتی معادل سرعت نور حرکت میکنند، تقریباً در هر میکروثانیه 300 متر را در فضا طی میکنند؛ حال اگر سیستم رادار مذکور دارای یک ساعت بسیار دقیق و قوی باشد، میتواند با دقت بسیار بالایی موقعیت هواپیما را مشخص کند، با استفاده از روشهای خاص پردازش سیگنال برای تحلیل پدیده داپلر بر روی موجهای برگشتی میتوان به دقت سرعت هواپیما را مشخص کرد.
آنتن رادار ، یک دسته پالس امواج رادیویی کوچک (اما قدرتمند) را با یک فرکانس مشخص منتشر می سازد. هنگامی که امواج به یک جسم برخورد میکنند منعکس شده و در اثر پدیده داپلر فشرده تر یا گسسته تر میشوند. همان آنتن وظیفه دریافت امواج منعکس شده را که البته بسیار کمتر از امواج ارسالی هستند بر عهده دارد.
در رادارهای زمینی قضیه خیلی پیچیدهتر از رادارهای هوایی است، هنگامی که یک رادار پلیس به ارسال پالس موج رادیویی میپردازد بخاطر وجود اجسام بسیار در سر راهش مانند نردهها، پلها، تپه ها و ساختمانها پژواکهای بسیاری را دریافت میدارد، اما از آنجایی که تمام این اجسام ثابت هستند به جزء خودروها مورد نظر، لذا سیستم رادار خودروهای پلیس ، از میان امواج منعکس شده، فقط آنهایی را انتخاب میکند که در آنها پدیده داپلر قابل شناسایی است،( آن هم به اندازه ای که جسم متحرک اضافه سرعت داشته باشد،) در ضمن آنتن این رادارها بسیار دهانه تنگی دارند، چرا که فقط بر روی یک خودرو تنظیم میشوند.
البته امروزه پلیسها در برخی کشورها از جمله کشور خودمان از تکنولوژی لیزر برای تعیین سرعت خودروها در بزرگراهها استفاده میکنند. این تکنولوژی به نام «لیدار» شناخته میشود. در این مدل بجای امواج رادیویی از اشعه نوری متمرکز (یا همان لیزر) استفاده میشود.
· فضایی
جابجایی اجسام - شاتلهای فضایی و ماهوارههای دوار بر دور کره زمین از چیزی با عنوان رادار حفره های مجازی برای تهیه نقشه از عوارض جغرافیایی سطح زمین ، ماه و دیگر سیارات استفاده میکنند.
· رادار در طبیعت
شاید رادار طبیعی بیشترین استفاده را برای خفاش دارد. چرا که این پرنده شب پرواز ، دارای حس بینایی ضعیفی است و به کمک طبیعت راداری که دارد، میتواند موانع دور و برخود را تشخیص دهد. خفاش هنگام پرواز فریادهای ابر صوتی خاصی ایجاد میکند که پس از برخورد با اجسام مختلف ، منعکس میشود و به گوش خفاش میرسد. بوسیله همین پژواک صداهای ابر صوتی است که نوع مانع و فاصله آن را تشخیص میدهد و طوری پرواز میکند که از تصادم با آنها در امان باشد. بالنها و دلفینها نیز از همین پدیده بازتاب استفاده میکنند که در مورد بازتابهای صوتی به آن "سونار" گفته میشود.
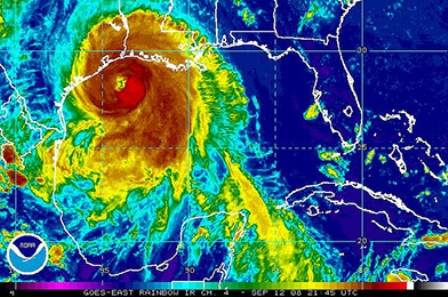
· رادار هواشناسی
در سالهای اخیر رادار برای افزایش کارایی پیشبینی وضع هوا به ابزاری بسیار ارزشمندی تبدیل شده است.
زمینههای استفاده از رادار در هواشناسی به شرح زیر است :
1- تعیین فاصله هدف (ابر، منطقه بارش، جبهه ها و …) تا ایستگاه مورد نظر;
2- شناخت نوع هدف (انواع جبهه ها، انواع ابرها و …);
3- شناخت نوع ریزش (باران، تگرگ، برف و …);
4- شناخت موقعیت و ارزیابی انواع سیکلونهای حارهای و توفندها;
5- شناخت مسیر حرکت و تعقیب روند تغییرات تظاهرات فوق در مسیر حرکت.
کار رادار براساس خاصیت قطرات آب و ذرات بلور موجود در ابرهاست که مانند مانعی، امواج ارسال شده از رادار مستقر بر سطح زمین را منعکس میکنند.
از آنجا که سرعت امواج الکترو مغناطیسی، ثابت (300.000 کیلومتر در ثانیه) است می توان با استفاده از ارسال امواج و سنجش زمان رفت و برگشت آنها، فاصله هدف از ایستگاه را مشخص کرد.
دستگاه رادار از سه قسمت، یعنی فرستنده، آنتن و گیرنده تشکیل شده است.
شیوه کار بدین شکل است که ابتدا بوسیله لامپ فرستنده (magnetron) ، ضربان منقطع از امواج الکترومغناطیس با فرکانس بالا تولید می شود و آن را از طریق آنتن رادار، که در بیشتر موارد محدب است، به سمت مانع (مثلا ابر) می فرستند؛ پس از برخورد به قطرات یا ذرات بلور موجود در ابر، بلافاصله به انعکاس پخشی دچار میشوند و به سوی زمین بر میگردند که البته تنها قسمتی از آن از طریق آنتن رادار به گیرنده میرسد زیرا دامنه ضربان مورد بحث در این رفت و برگشت تضعیف میشود، لذا آن را با دستگاه تقویت کنندهای حدود یک میلیون برابر (106) تقویت میکنند.
این امواج در مرحله بعد به صفحه تصویر(نوساننما) منتقل و سپس به صورت لکههای نورانی مشخص میشوند. از روی تصویر دریافتی میتوان نوع تظاهرات جوی را به خوبی تشخیص داد؛ مثلا رگبار و ابرهای تندری، در صفحه تصویر به صورت لکه های روشن و نامنظم دیده میشود.
در بین تظاهرات جوی ؛ جبهه سرد، واضحتر و روشنتر از بقیه تصاویر دیده میشود به طوری که امکان شناسایی و پیشبینی مسیر حرکت آنها با هیچ روشی تا این حد موفق نیست.
نگسرادنگسراد به معنی نسل جدید رادارهای هواشناسی است و چنین وسیلهای برای سنجش و پیش بینی وقوع تغییرات ناگهانی آب و هوا (مثل توفان، گردباد) بکار میرود.
در این وسیله از امواج الکترومغناطیس استفاده میشود. برای این امواج نیز ممکن است (همانند صدا) پدیده دوپلر روی دهد. همانطور که میدانید گردباد متشکل از ذرّات ریز آب و هوا است که با سرعت زیاد حول محوری متحرّک در چرخشند. امواج رادار توسط نگسراد صادر میشود. بازتاب این امواج از ذرّات آب به سمت نگسراد بازمیگردد. در این حالت بسامد امواج فرستاده شده و بازتابیده با یکدیگر مقایسه میشوند.
البته امواج بازتابی دارای بسامدهای مختلفی هستند. ذرّات که به سمت دستگاه در حرکتند امواج رادار را با بسامد بالاتر باز میتابانند (طبق پدیده دوپلر). برعکس ذرّات که در حال دور شدن از نگسراد هستند امواج رادار را با بسامدی پایینتر از بسامد ارسالی باز میتابانند. پردازشهای کامپیوتری بر روی مقادیر بسامد دریافتی تصاویری را می سازد که نشانگر جهت و سرعت باد میباشند.
رادار تصویری
مقدمه :
گاه امکان بررسی اجسام از نزدیک وجود ندارد . برای مثال جهت بررسی سطح اقیانوس ها نقشه برداری از اراضی جغرافیایی لزوم ساخت وسایلی که بتوانند از راه دور این کاررا انجام دهند به چشم می خورد . با دستیابی به تکنولوژی سنجش از راه دور بسیاری از این مشکلات برطرف گشت . در واقع در این روش امکان بررسی اجسام وسطوحی که نیاز به بررسی از راه دور دارند را فراهم می آورد . سنجش از راه دور رامی توان به دو بخش فعال وغیر فعال تقسیم کرد . گستره طول موج امواج میکرویو نسبت به طیف مادون قرمز ومرئی سبب گردیده تا برای سنجش از راه دور به وسیله امواج از این طیف استفاده گردد .
عملکردسیستم های سنجش غیرفعال همانند سیستم های سنجش دما عمل می کنند .دراینگونه سیستم ها با اندازه گیری انرژی الکترومغناطیسی که هر جسم به طور طبیعی از خود ساطع می کند نتایج لازم کسب می گردد .هواشناسی واقیانوس نگاری از کاربردهای این نوع سنجش می باشد .
در سیستم های سنجش فعال از طیف موج میکرویو برای روشن کردن هدف استفاده می شود . این سنسورها را می توان به دو بخش تقسیم کرد : سنسورهای تصویری وغیرتصویری (فاقد قابلیت تصویربرداری) .
از انواع سنسور های غیر تصویری می توان به ارتفاع سنج واسکترومتر ها(پراکنش سنج ) اشاره کرد .کاربرد ارتفاع سنج ها در عکس برداری جغرافیایی وتعیین ارتفاع ازسطح دریا می باشد .اسکترومتر که اغلب بر روی زمین نصب میگردند میزان پراکنش امواج را ازسطوح مختلف اندازه گیری می کنند . این وسیله در مواردی همچون اندازه گیری سرعت باد در سطح دریا و کالیبراسیون تصویر رادار کابرد دارد .
معمول ترین سنسور فعال که عمل تصویربرداری را انجام می دهد رادار می باشد . رادارمخفف(radio detection and ranging) بوده وبه معنی آشکارسازی به کمک امواج میکرویو است .به طور کلی می توان عملکرد رادار را در چگونگی عملکرد سنسورهای آن خلاصه کرد . سنسورها سیگنال های میکرویو را به سمت اهداف مورد نظر ارسال کرده وسپس سیگنال های بازتابیده شده از سطوح مختلف را شناسایی می کند . قدرت (میزان انرژی) سیگنالهای پراکنده شده جهت تفکیک اهداف مورد استفاده قرارمی گیرد . با اندازه گیری فاصه زمانی بین ارسال ودریافت سیگنال ها می توان فاصله تا اهداف را مشخص کرد . از مزایای شاخص رادار می توان به عملکرد رادار در شب یا روز وهمچنین قابلیت تصویربرداری درشریط آب و هوایی مختلف اشاره کرد . امواج میکرویو قادر به نفوذ در ابر مه ,گردوغبار وباران می باشند . از آنجاییکه عملکرد رادار با طرز کار سنسورهایی که با طیف های مرئی ومادون قرمز کار می کنند متفاوت است لذا می توان با تلفیق اطلاعات بدست آمده تصاویر دقیقی را بدست آورد .
§ اصول رادار :
مهمترین نکته حائز اهمیت در بخش قبل را میتوان معرفی رادار به عنوان وسیله اندازه گیری معرفی کرد . اجزاء تشکیل دهنده سیستم رادار فرستنده , گیرنده آنتن وسیستم های الکتریکی جهت ثبت و پردازش اطلاعات می باشد . همانطور که در تصویر شماره 1 مشاهده می شود فرستنده ، پالس های کوتاه میکرویو (A) را که بوسیله آنتن راداربه صورت پرتو متمرکز می شوند(B) با فاصله زمانی معیین تولید می کند . آنتن راداربخشی از سیگنال هی بازتابیده شده (c) از سطوح مختلف را دریافت می کند.با اندازه گیری مدت زمان ارسال پالس و دریافت پژواک های پراکنده شده از اشیاء مختلف می توان فاصله آنها ودر نتیجه موقعیت آنها را تعیین نمود .با ثبت و پردازش سیگنال بازتابیده توسط سنسور تصویر دو بعدی از سطح مورد نظر تشکیل می گردد .
پهنای باند :
از آنجاییکه گستره طیف امواج میکرویو نسبت به طیف های مرئی ومادون قرمزوسیع تر می باشد لذا اکثر رادار ها از این طیف استفاده می کنند . در رادارهای تصویری اغلب از طول موج های زیر استفاده می شود:
· ka&k&ku band
· Xband
· Cband
· Sband
· Lband
· P_band
تمامی طول موج های استفاده شده در رادارهای تصویری در محدوده سانتیمتر است . طول موج رادار در نحوه تشکیل تصویر موثر می باشد . با افزیش طول موج شاهد تصاویر با کیفیت بهتر می باشیم .در دو تصویر زیر(تصاویر شماره 2و3) از دو طول موج متفاوت استفاده شده است . شما می توانید تفاوت آشکاری را که دراین تصاویر وجود دارد مشاهده نمایید . علت این تفاوت تغییر در نحوه فعل وانفعال سیگنال با سطح اشیاء میباشد که در ادامه درباره این موضوع صحبت خواهد شد
قطبیدگی(polarization) :
هنگامی که در مورد امواج الکترومغناطیسی همانند امواج میکرویو صحبت می گردد بحث درباره قطبیدگی حائز اهمیت می باشد . قطبیدگی عبارت است از جهت میدان الکتریکی در امواج الکترومغناطیسی . به طور کلی می توان قطبیدگی امواج را به سه دسته تقسیم بندی کرد : قطبیدگی خطی و دایره ای وبیضوی . اغلب رادار های تصویری از قطبیدگی خطی استفاده کرده , که این نوع قطبیدگی را می توان به دو بخش عمودی(vertical) وافقی (horizontal) تقسیم بندی کرد (تصویر شماره4). اغلب سنسورهای رادار طوری طراحی شده اند که قابلیت ارسال وهمچنین دریافت امواج را به یکی از دو صورت بالا دارا هستند . در بعضی از رادارها دریافت وارسال امواج با ترکیبی از دو نوع قطبیدگی انجام می پذیرد
به طور کلی می توان چهارترکیب از قطبیدگی رادار در نظر گرفت :
· HH
· VV
· HV
· VH
حرف H نشان دهنده قطبیدگی افقی وحرفV نمیانگر قطبیدگی عمودی میباشد . درچهارترکیب بالا حرف سمت راست نحوه دریافت سیگنال را نشان می دهد .
§ هندسه رادار (radar geometry):درسیستم تصویربرداری رادار هوایی با جابجانمودن سکو در یک مسیر مستقیم که مسیرپرواز(flight direction)(A) نامیده می شودعمل تصویربرداری انجام میگردد . پای قائم در صفحه تصویر را ندیر(nadir)(B) می نامیم .آنتن رادار امواج را برای روشن کردن نوارتصویر(swath) (C) ارسال می کند . با قرار گرفتن نوارهای تصویر در کنار هم ناحیه تصویر(track) (ناحیه خاکستری رنگ ) تشکیل می گردد که این ناحیه نسبت به خط ندیر فاصله دارد . محور طولی ناحیه تصویرکه با مسیر پروازموازی می باشد را سمت(azimuth)(E) ومحورعرضی راکه برمسیرپروازعمود است را برد(range)(D) می نامیم .
§ واژه شناسی :
محدوده نزدیک (Near range): بخشی از نوارتصویر که به خط ندیر نزدیک است .
محدوده دور(far range) : بخشی از نوار تصویر که در فاصله دور نسبت به خط ندیر قرار دارد .
برد میل (slant range): خط شعاعی که از رادار به هریک از اهداف می توان نظیر کرد .
برد زمینی (ground range ) : تصویر برد میل در سطح زمین .
زاویه تابش(incidence angle) : زاویه بین پرتورادار و سطح زمین .
زاویه دید(look angle) : زاویه بین خط عمود وپرتو رادار.
§ اثرات سطح بر تصویر رادار :میزان روشنیی ( درخشندگی ) تصویر به میزان پراکندگی(scattering) سیگنال های میکرویو در برخورد با سطح بستگی دارد . پراکنش سیگنال به پارامترهایی از قبیل مشخصات رادار (فرکانس قطبیدگی هندسه دید و…) وهمچنین خصوصیات سطح (پستی وبلندی نوع پوشش و…) وابسته است . به طور کلی می توانیم عوامل بالا را در سه عامل اصلی زیر خلاصه کنیم :
1) صیقلی بودن سطح
2) هنسه دید و رابطه آن باسطح
3) درصد رطوبت وخصوصیات الکتریکی سطح
صیقلی بودن سطح مهمترین عامل تعیین کننده روشنایی تصویرمی باشد . سطوح صاف موجب بازتابش آیینه ای(A) در فعل وانفعال سیگنال رادار با سطح می گردند . درنتیجه این نوع بازتابش مقدار اندکی ازسیگنال های بازتابیده شده به سمت رادار باز میگردند . بنابرین سطوح صاف با درجه تیره گی بیشتر در تصویر ظاهر خواهند گشت . سطوح ناصاف سیگنال های رادار راتقریبا به صورت یکنواخت بازتاب می دهند . و درنتیجه بخش عمده ای از این سیگنال ها به سمت راداربازمیگردند . بنابرین سطوح ناصاف با درجه روشنایی بیشتر در تصویر مشاهده می شوند . به این نوع انعکاس بازتابش پخشیده(B)گفته می شود . احتمال وقوع انعکاس زاویه ای (C) در نواحی که از سطوح عمود برهم تشکیل شده وجود دارد. به بیان ساده تر سیگنال های بازتابیده شده از سطح اول پس از برخورد به سطح دوم به سمت رادار بازتاب داده میشود .این نوع انعکاس به طور معمول در مناطق شهری (ساختمان ها خیابان ها پل ها و… ) اتفاق می افتد . صخره ها کوه ها ونیزار رودخانه ها نیز سیگنال رادار را اینگونه بازتاب می دهند .
زاویه تابش(incidence angle) نیز در نحوه شکل گیری تصویر همچنین صیقلی بودن سطوح نقش ایفا می کند . با در نظر گرفتن سطح وطول موج ثابت با افزیش زاویه تابش سیگنال های کمتری به سوی رادار بازمیگردند ودر نتیجه درجه تیره گی افزیش می یابد .به بیان دیگر با افزیش زاویه تابش سطوح صیقلی تر از مقدار واقعی خود در تصویر ظاهرمی شوند .
به طور کلی تغییر در هندسه دید در بهبود نقشه های جغرافیایی وهمچنین برطرف کردن اختلال هایی از قبیل سیه دارشدن و کاهش عمق تصویرموثر می باشد .
وجود رطوبت در خصوصیات الکتریکی وحجم اجسام موثر می باشد . تغییر در خواص الکتریکی در جذب ارسال وهمچنین نحوه شکل گیری تصویر موثر می باشد . بنابراین درصد رطوبت اجسام در فعل وانفعال سیگنال رادارومتعاقبا تصویر موثر می باشد . معمولا با افزیش رطوبت جسم سیگنال های بیشتری توسط جسم بازتابیده می شود . برای مثال علفزارهای وسیع در هنگامی که مرطوب هستند در تصویر رادار روشنتر ظاهر می شوند .
§ دقت تفکیک(spatial resolution) :به میزان توانایی رادار جهت تفکیک اشیاء مختلف از همدیگر دقت تفکیک گفته می شود . بر خلاف سیستم های نوری افزیش دقت تفکیک در رادار بر اساس خصوصیات امواج میکرویو وهمچنین تاثیرات هندسی انجام می پذیرد . دررادارهایی که از یک آنتن جهت ارسال امواج استفاده می کنند یک پالس موج ارسال گشته و با دریافت پژواک آن توسط گیرنده تصویر تشکیل می شود .
دقت تفکیک را می توان در دو راستا بررسی کرد . در جهت سمت ناحیه تصویر که دقت سمت (azimuth resolution) نامیده می شود ودر جهت برد که آن را دقت برد (range resolution) می نامیم .
دقت برد به طول پالس رادار (P) بستگی دارد . در صورتی که عمل تفکیک با طول بیشتر از نصف پالس صورت گیرد اهداف از یکدیگر قابل تشخیص اند . برای مثال در شکل شماره 8 اهداف 1و2 در تصویر به صورت یک جسم مشخص شده در حالیکه هدف های 3و4 به راحتی از هم تفکیک شده اند . با افزیش زاویه تابش (افزیش برد )شاهد کاهش دقت برد می باشیم .دقت سمت به پهنای ستون امواج رادار یا پهنای زاویه ای (beam width) (A) و همچنین برد مایل(slant range) وابسته است . با افزیش پهنای زاویه ای می توانیم شاهد دقت سمت باشیم . در تصویرشماره 9 اهداف 1و2 که در محدوده نزدیک قرار دارند توسط رادار به راحتی قابل تشخیص اند درحالیکه هدف های 3و4 که در محدوده دور قرار گرفته اند قابل تشخیص نمی باشند . همچنین با افزیش طول آنتن رادار می توان دقت سمت را افزیش داد رادار دهانه ترکیبی (syntheticaperture radar):همانطور که در قسمت قبل گفته شد جهت بالابردن دقت سمت می توانیم طول آنتن رادار را افزیش دهیم . اگرچه در این افزیش طول ما با محدودیت هایی مواجه هستیم . در رادرهای هوایی طول آنتن رادار بین 1 تا 2 متر در نظر گرفته می شود . در ماهواره ها ما می توانیم این محدوده را بین 10 تا 15 متر در نظر بگیریم . با تغییراتی در چگونگی حرکت سکوی رادار وثبت و پردازش سیگنال های بازتابیده شده می توان بر محدودیت اندازه غلبه کرد . بدین طریق که ما با تغییر در نحوه رفتار رادار به صورت مجازی طول آنتن رادار را افزیش داده یم .1) ابتداشیءهدف (A)سیگنال های میکرویو را به صورت پالس دریافت کرده . پژواک های هر پالس توسط رادار ثبت می شوند . سکوی رادار در مسیر مستقیم به طور پیوسته در حال حرکت است . در طول زمانی که شیء هدف در معرض پالس های رادار قرار داردعمل ثبت سیگنال های بازتابیده شده از شیءتوسط رادار انجام می پذیرد .
2) زمان چندانی طول نمی کشد تا طول آنتن ترکیبی (B) مشخص گردد .
با افزیش پهنای زاویه ای وهمچنین کاهش سرعت سکو می توانیم دقت سمت را در محدوده دور افزیش دهیم .در نتیجه شاهد ثابت ماندن دقت تفکیک درراستای سمت می باشیم .به تکنولوژی فوق که جهت افزیش دقت برد صورت می پذیرد رادار دهانه ترکیبی یا SAR گفته می شود .این روش در اکثررادارهای هوایی وفضایی استفاده می شود .§ خصوصیات تصویر رادار :در تصاویر رادار با نوعی اختلال مواجه هستیم که به نویز اسپیکل(speckle) معروف است .این اختلال که باعث ظاهرشدن دانه های ریزودرشت (بافت فلفل نمکی) در تصویر می شود زاییده ساختار بهم ریخته سطح و همچنین تداخل سیگنال هی بازتابیده می باشد . به عنوان نمونه یک سطح هموار مانند علفزار(تصویر شماره 11) را در نظر می گیریم . بدون در نظر گرفتن اثر این اختلال پیکسلهای تصویر با درجه روشنایی یکسان مشاهده می شوند . حال آنکه در تصویر حقیقی به علت تداخل سیگنال های پراکنده شده پیکسل ها داری درجات روشنایی متفاوت می باشند .در واقع نویز اسپیکل کیفیت تصاویر راکاهش داده ودر نتیجه درتحلیل تصاویربا مشکل مواجه می شویم .حال برای کاهش این اثر میتوان دو روش را بکار برد :
1) دید چندگانه (multi-looking processing):
در این روش هر پرتو رادار به چندین زیرپرتو (اشعه) تقسیم شده و هر اشعه وظیفه پوشش دادن یک ناحیه را بر عهده دارد . با ثبت تصاویر تشکیل شده توسط هر اشعه ومعدل گیری از آنها جهت تشکیل تصویر نهایی می توان نویز اسپیکل را کاهش داد .2) فیلترینگ (spatial filtering) :
پس از پایان یافتن مرحله اول وتشکیل تصویر اولیه فیلترکردن تصویر آغاز می شود . دراین روش با حرکت دادن یک پنجره متشکل از تعدادی پیکسل (معمولا 55 یا 33 ) در طی سطر وستون تصویر از پیکسل هایی که هر پنجره پوشش می دهد معدل گیری (درجه روشنایی پیکسل های موجود در هر پنجره اندازه گیری شده وپیکسلی با درجه روشنایی واحد جایگزین پنجره مربوطه می گردد) انجام می شود . بایستی توجه داشته باشیم که کاهش نویز اسپیکل باعث کاهش وضوح تصویر می گردد . همانطور که درتصاویرزیر مشاهده می شود تصویر زیرین نسبت به تصویر دیگر داری وضوح کمتری است . در نتیجه برای ایجاد تصاویر با جزئیات دقیق نمی توان از این روش استفاده کرد . زمانی که سطح هدف را وسیع در نظر بگیریم کاهش نویز اسپیکل می تواند مثمر ثمرباشد .
گاه نیاز به استفاده از اندازه گیریهای دقیق جهت مقایسه مشاهدات وبدست آوردن نتایج لازم می باشد . در نتیجه بایستی دقت ابزار اندازه گیری افزیش پیدا کند . این فعل توسط فرآیندی به نام کالیبراسیون (calibrasion) انجام پذیر است . ازآنجاییکه عمل اندازه گیری از اعمال اصلی رادار می باشد در نتیجه کالیبراسیون بسیار مهم می باشد . کالیبراسیون تلاش می کند تا اختلاف میان مقدار انرژی سیگنال بازتابیده با مقدار اندازه گیری شده توسط رادار کاهش یابد . در نتیجه کالیبراسیون دقیق ما شاهد تصاویری با دقت اندازه گیری یکسان توسط رادار خواهیم بود .
در کالیبراسیون نسبی سعی بر افزیش دقت سیستم رادار است . در حالیکه در کالیبراسیون مطلق با نصب دستگاه هایی بر روی زمین انرژی سیگنال های بازتابیده شده از سطح اندازه گیری شده و پس از تقویت به سوی رادار فرستاده می شوند. رادار می تواند با استفاده از این مقادیر به مقدار حقیقی انرژی دست پیدا کند .ودر نتیجه استنباط دقیقتری ازسطح حاصل داشته باشد .
§ کاربردهی پیشرفته :
علا وه بر کسب واستفاده درست از اطلاعات کابرد های خاص رادار به شرح زیر می باشد :
نخست تکنولوژی تصویر سه بعدی (stereo image) می باشد . در این روش با پوشش دادن ناحیه تصویر با زوایای تابش متفاوت وهمچنین بهره گیری ازجهت های دید متفاوت یا مخالف و انطباق تصاویر ایجادشده می توان یک تصویر سه بعدی از ناحیه تصویر ایجاد کرد .در نتیجه اختلال هایی از قبیل سیه دارشدن بعضی نواحی برطرف گردیده وزمینه برای تحلیل دقیقتر تصاویر فراهم می گردد . این تکنولوژی در تحلیل تصاویر مناطق جنگلی و جغرافیایی وهمچنین نقشه برداری از اراضی کاربرد دارد .
از دیگر پیشرفت های حاصل شده می توان به قطبش سنجی (polqrimetry) اشاره کرد . در این روش امکان دریافت و ارسال سیگنال های میکرویو به صورت ترکیبی از قطبیدگی افقی و عمودی وجود دارد . در نتیجه ما می توانیم چهار ترکیب HH VV VH HV را برای دریافت یا ارسال امواج در نظر بگیریم . بدین طریق با ایجاد تصاویری با ویژ گی های مختلف نتایج لازم جهت دستیابی به تصویر دقیقتر حاصل می گردد .
لطفا بر روی آیکن گوگل پلاس (g+1) کلیک نمایید و ما را در گوگل محبوب کنید .

![]()
:: برچسبها:
ماهواره ,
های ,
سنجش ,
از ,
دور ,
RS ,
ریموت سنسینگ ,
:: بازدید از این مطلب : 9974
|
امتیاز مطلب : 21
|
تعداد امتیازدهندگان : 6
|
مجموع امتیاز : 6





